고정 헤더 영역
상세 컨텐츠
본문
728x90
Openpilot Steering below 55 km/h
For Genesis 2016
LKAS sends commands to MDPS via C-CAN Bus. C-CAN is a two-wire starts from the inner fuse box (IGPM), goes around the car until return to the instrument cluster.

All systems connected to the C-CAN are connected via joint connectors which are T junction.
To achieve steering down to zero, MDPS must be tricked by modifying the speed message issued by instrument cluster to be higher than 60 km / h in case the speed is less than that.
To do this, the MDPS must be isolated from C-CAN and connected to the panda in order to modify messages sent to MDPS.

Panda has three CAN interfaces: CAN1 is dedicated to C-CAN, CAN2 is dedicated for radar data but unfortunately in Hyundai, Kia and Genesis, it does not contain radar information but rather the front camera data so it is not being utilized at this time, and CAN3 is dedicated to LKAS
Also,I like everything to be done without cutting the car harness, with the option to undo everything quickly.
All of this can be achieved by getting a few connectors with the same pin as the original one.
Required connectors:
1x https://www.aliexpress.com/item/32681298638.html
2x https://www.aliexpress.com/item/32683551803.html
1x https://www.aliexpress.com/item/32655106876.html or similar (only 2 pairs required)
* crimping tools needed
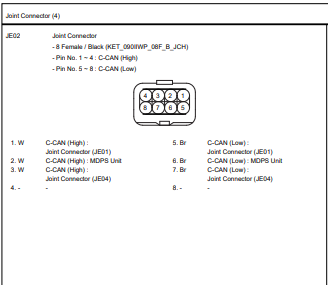
Disconnecting MDPS from C-CAN:
MDPS located under the car between the front wheels, and C-CAN joint connector located, in a hard spot, behind the radiator on the right. It has grey cover.

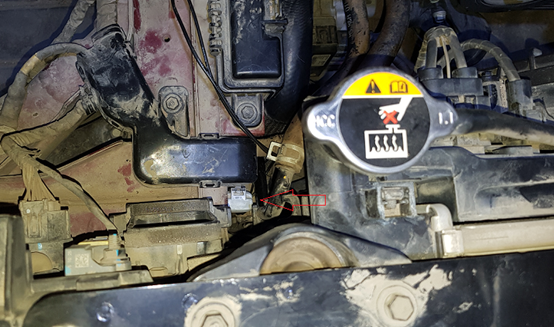


The connector has six wires: three CAN-High connected to each other and three CAN-Low connected to each other, the two wires in the middle are the MDPS CAN and the C-CAN connects to it in this connector.
To release the connector from its position, press the tap in the cover then push the connector down.
Remove the connector lock.

Remove the MDPS wires by inserting a terminal removal tool or a needle and push the tap to release the terminal and pull the wire from behind

Insert them into the new 2 pin connector

Connecting MDPS To Panda CAN2:
Make new wire harness with four wires, connect one end to the new 4 pin connector, on the other side, connect two of them to 2 pin connector.

Connect both 2 pin connectors together, and insert the 2 left wire into the original connector in MDPS wire places.

Now, the four pin connector is the connection point of MDPS with C-CAN.
This will be your original mode connector, everything will be same as before:

Make new 4 pin connector with only two wire facing MDPS wire and connect it to Panda CAN2.




https://cafe.naver.com/thisandthatkorea
'제네시스DH, G80' 카테고리의 다른 글
| Custom Forks - dragonpilot (0) | 2023.04.10 |
|---|---|
| Custom Forks (0) | 2023.04.10 |
| master-ci 0.9 (0) | 2023.04.10 |
| 제네시스 DH / G80 반자율주행 시스템(openpilot) 만들기 - comma three 소프트웨어 설정편 (0) | 2023.04.06 |
| 제네시스 DH / G80 스포츠휠 및 타이어 245/45 R19, 275/40 R19 로 교체하기 (0) | 2023.04.06 |





댓글 영역